近几年,随着社会和经济的不断发展,人们对推土机的适应工况要求越来越高,如垃圾填埋、抢险救援、军事排雷、核能、建筑拆除、水泥生产以及冶金等特殊工况作业环境恶劣,对人身体健康和安全威胁较大,不适合作业人员在现场直接操作推土机施工作业,为此开发适应恶劣环境的遥控型推土机,已经成为提高产品市场竞争力的一个重要途径。
一、液压系统组成与原理
推土机在正常使用中,作业动作分为行走动作和工作装置调整动作,其中行走动作包括主机的前进、后退、左转、右转和制动,工作装置调整动作包括铲刀的上升、下降、浮动、左倾斜和右倾斜,这两部分的动作分别依靠行走系统和工作装置液压系统完成。无线远程控制采用电磁波来传递控制信号,与机械装置相比,液压系统与电气控制系统具有更好的结合性,为了实现对推土机无线远程控制,并实现高效节能,遥控推土机行走系统、工作装置一般采用液压系统驱动。
行走液压系统
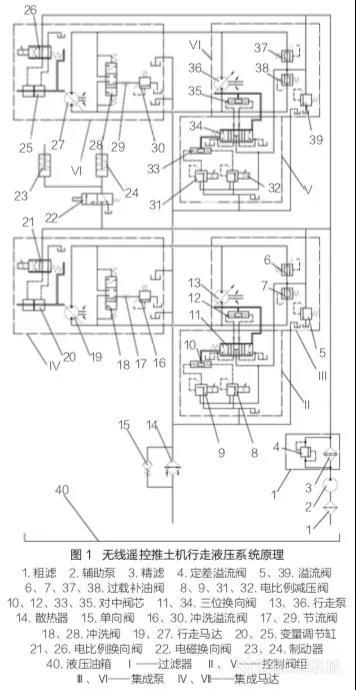
无线遥控推土机采用闭式双回路静液压驱动,其中包括行走系统和辅助系统两部分,在实现推土机基础行走动作的同时具有无级调速功能,某型无线遥控推土机行走液压系统原理如图1所示。
行走系统
行走系统为闭式双回路结构形式,包括左行走系统和右行走系统。左行走系统由集成泵III、集成马达IV、控制阀组II和管路组成。右行走系统由集成泵VI、集成马达VII、控制阀组V和管路组成,左、右行走系统原理相同,下面以左行走系统为例进行说明。
行走泵13和行走马达19进、出油口两两相连,构成行走系统主油路,且泵和马达都为双向运行,实现推土机的前进、后退动作。过载补油阀6和7分别由1个溢流阀和1个单向阀组成,用于对主油路压油侧进行过载保护和对吸油侧进行补油。溢流阀5为调压阀,用于调定进入集成泵III补油压力和控制阀组II控制压力。对中阀芯10与三位换向阀11阀芯刚性连接,三位换向阀11阀体、对中阀芯12以及行走泵13调节机构三者刚性连接,并通过阀芯机能和弹簧力作用,形成了一个变量调节负反馈调节机构。
电比例减压阀8、9为线性比例控制阀,通过改变控制电流大小可实现输出油液压力大小控制。给定电比例减压阀8一定大小的控制电流时,其输出一定值的压力油,推动对中阀芯10左移,并通过负反馈调节机构实现行走泵13正向排量大小的调节。同理给定电比例减压阀9一定大小的控制电流,可以实现行走泵13反向排量的调节,即通过控制电比例减压阀8和9输入电流的大小,即可控制行走泵13的正、反向排量大小调节,排量调节范围0.1%。
电比例换向阀21和变量调节缸20组成行走马达19的排量调节机构,通过调节电比例换向阀21输入电流控制变量调节缸20位移,从而实现马达排量的调节。排量调节为线性必例调节,调节范围30.1%。冲洗阀18和节流阀19用于将泵吸油侧一定流量的热油导流到马达壳体,通过壳体回油冷却和补油泵补油保证主油路工作温度符合要求。溢流阀16为1个回油背压阀。
行走泵和行走马达(排量为线性比例调节)均为变量元件,在其组成的容积调速回路中,可实现恒转矩调节和恒功率调节,以此适应各种工况下的转速调节,从而实现推土机的无级调速功能。同时通过控制行走泵和马达的排量,可使左、右行走系统产生速度差,实现推土机的左、右转向。当其中一侧行走系统静止、另一侧运动时,即可实现推土机原地转向。
左、右行走系统的泵和马达均为电比例控制,控制方式分为数字量控制和模拟量控制,数字量控制采用脉宽调制信号PWM形式,矩形波占空比在范围内可调。模拟量控制采用直流电叠加或不叠加颤振信号形式,很好地与电气控制系统相结合。在推土机主机驾驶室和遥控室中分别设置电控手柄,可分别实现传统驾驶室操作模式与遥控模式。
辅助系统
辅助系统分为供油系统、制动系统和回油冷却系统3部分组成,在供油系统中,辅助泵2经粗滤1从液压油箱40中吸油,再经过滤器I过滤后,分别为主油路补油、控制阀组控制、行走马达控制和制动器控制提供压力油,定差溢流阀4可在精滤3堵塞达到压差设定值后,使油液直接进入系统;在制动系统中,通过控制电磁换向阀22的通断控制制动器23和24,在推土机需要制动时,控制行走泵的电比例减压阀全部失电,使行走泵排量降为零,切断了行走主油路的压力油。同时电磁换向阀22失电切断制动器压力油,制动器中油液回油箱,依靠弹簧复位后的压紧力实现制动。在回油冷却系统中,行走泵、控制阀组和行走马达的壳体中的油经冷却器14流回油箱,单向阀15可在冷却器堵塞或回油量过大时,使油液直接流回液压油箱,保护过滤器。
工作装置液压系统
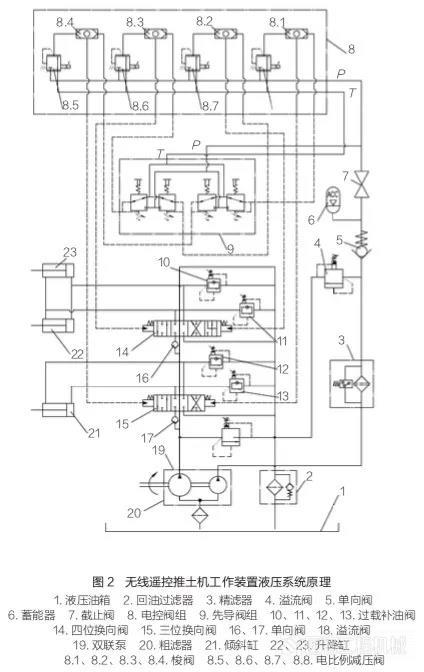
工作装置液压系统由工作系统和控制系统2部分组成,控制系统采用电控和液控并存的结构形式,可实现远程遥控操作和驾驶室直接操作双模式并存。电控结构可与电气控制系统良好结合,从而实现无线遥控功能。液控结构采用液压先导控制,具有良好的可靠性,在遥控系统出现故障时,依然可以在驾驶室中正常操作推土机工作,工作装置液压系统原理如图2所示。
工作系统
双联泵19大泵经粗滤器吸油向工作系统供油,溢流阀18限定工作油路最高压力和起安全保护的作用。三位换向阀15通过切换倾斜缸进回油方向,实现铲刀左倾、右倾调整动作。同理四位换向阀14用于实现铲刀提升、下降动作,当四位换向阀14在最右端阀位工作时,2个铲刀升降缸进、回油路相通,升降缸2腔同时进入失压状态,实现铲刀浮动动作。两换向阀采用串并联结构,同一时间只能允许铲刀实现单一调整动作,铲刀动作所需供油量充分,铲刀动作调整响应迅速。
倾斜缸动作所需流量小于升降缸流量,在设计倾斜管路时,可让倾斜管路直径小于升降管路直径,即通过管路节流来使铲刀倾斜缸获得所需的流量。铲刀升降油路和倾斜油路共接有4个过载补油阀,在推土铲受到冲击时,液压缸压力油腔通过过载补油阀中的溢流阀对系统进行保护,同时液压缸无压腔通过过载补油阀单向阀进行补油,避免液压缸无压腔吸空。
控制系统
控制系统分为供油系统、液控系统和电控系统共3部分。双联小泵吸油后经精滤器过滤后分别向液控系统、电控系统和蓄能器供油。溢流阀4作为调压阀用于限定控制系统压力,单向阀4用于因发动机熄火造成泵停止运行后保持蓄能器压力,蓄能器6用于在发动机熄火后继续为控制系统提供压力油,从而可以控制铲刀自由降落至地面。在先导阀组和电控阀组出现故障时,将截止阀7关闭,使蓄能器中的压力油锁住,可避免拆卸管路时油液喷出,方便对控制阀组进行检修。
液控系统由先导阀组、阀组进回油管路和控制管路组成。供油系统向先导阀组9提供一定压力油液,压力油通过阀组减压后经电控阀组梭阀对换向阀进行位移控制,同时换向阀芯回油经过梭阀流回油箱。该阀组为线性比例阀,可以根据阀组控制手柄位移大小输出不同压力的控制油。线性比例控制换向阀阀芯位移,实现不同流量的输出,便可满足驾驶员对铲刀调整动作不同速度的需求。
电控系统由电控阀组、阀组进回油管路和控制管路组成,电控阀组8由4个电比例压阀和4个梭阀组成。电比例减压阀为线性比例控制,可以根据输入控制电流的大小,将供油系统提供的压力油调节到所需压力,经梭阀对换向阀阀芯进行位移控制,从而实现驾驶员对所需的油缸动作和不同的动作速度。换向阀芯回油也经过梭阀流回油箱。
4个梭阀在系统中起到2个作用:一是实现电控系统和液控系统并存的结构形式;二是在电控或液控某一系统执行控制动作时,对另一系统进行冲击保护。4个电比例减压阀为电信号控制,是实现工作装置无线遥控动作的关键部分。
二、实际应用结果
本系统已成功应用于某型遥控推土机中,通过与电气控制系统的良好结合性,实现了推土机的遥控功能,可使驾驶员在遥控室中快速准确地控制堆土机行走动作和工作装置动作。在实际应用过程中,液压系统元件压力、流量等参数需根据不同功率大小的推土机具体要求进行计算。本系统在创新的同时兼顾传统,实现了推土机无线遥控驾驶模式和传统驾驶模式并存的结构形式,提高了推土机应对各种工况的适应性。
本系统在工作装置动作控制过程中,传统液控模式采用先导阀控制作业,无线遥控模式采用电信号控制遥控阀组来控制作业,2种模式都减小了驾驶员的劳动强度,且两者都与蓄能器相结合,保证在发动机熄火后操作先导阀或者遥控阀组可以使铲刀正常降落到地面。在进行其中任何一种模式操作时,另一种模式液压系统通过遥控阀组中的梭阀得到很好的冲击保护,保证了系统的正常运行和使用寿命。本系统充分发挥了推土机应对各种特殊、复杂工况的作业优势,尤其在作业环境恶劣的工况中,有效保证了作业人员的健康和安全。
 工程机械与维修
工程机械与维修 今日工程机械
今日工程机械
修机 | 无线遥控推土机液压系统原理与应用
匠客工程机械 评论(0)
来源:匠客工程机械
近几年,随着社会和经济的不断发展,人们对推土机的适应工况要求越来越高,如垃圾填埋、抢险救援、军事排雷、核能、建筑拆除、水泥生产以及冶金等特殊工况作业环境恶劣,对人身体健康和安全威胁较大,不适合作业人员在现场直接操作推土机施工作业,为此开发适应恶劣环境的遥控型推土机,已经成为提高产品市场竞争力的一个重要途径。
一、液压系统组成与原理
推土机在正常使用中,作业动作分为行走动作和工作装置调整动作,其中行走动作包括主机的前进、后退、左转、右转和制动,工作装置调整动作包括铲刀的上升、下降、浮动、左倾斜和右倾斜,这两部分的动作分别依靠行走系统和工作装置液压系统完成。无线远程控制采用电磁波来传递控制信号,与机械装置相比,液压系统与电气控制系统具有更好的结合性,为了实现对推土机无线远程控制,并实现高效节能,遥控推土机行走系统、工作装置一般采用液压系统驱动。
行走液压系统
无线遥控推土机采用闭式双回路静液压驱动,其中包括行走系统和辅助系统两部分,在实现推土机基础行走动作的同时具有无级调速功能,某型无线遥控推土机行走液压系统原理如图1所示。
行走系统
行走系统为闭式双回路结构形式,包括左行走系统和右行走系统。左行走系统由集成泵III、集成马达IV、控制阀组II和管路组成。右行走系统由集成泵VI、集成马达VII、控制阀组V和管路组成,左、右行走系统原理相同,下面以左行走系统为例进行说明。
行走泵13和行走马达19进、出油口两两相连,构成行走系统主油路,且泵和马达都为双向运行,实现推土机的前进、后退动作。过载补油阀6和7分别由1个溢流阀和1个单向阀组成,用于对主油路压油侧进行过载保护和对吸油侧进行补油。溢流阀5为调压阀,用于调定进入集成泵III补油压力和控制阀组II控制压力。对中阀芯10与三位换向阀11阀芯刚性连接,三位换向阀11阀体、对中阀芯12以及行走泵13调节机构三者刚性连接,并通过阀芯机能和弹簧力作用,形成了一个变量调节负反馈调节机构。
电比例减压阀8、9为线性比例控制阀,通过改变控制电流大小可实现输出油液压力大小控制。给定电比例减压阀8一定大小的控制电流时,其输出一定值的压力油,推动对中阀芯10左移,并通过负反馈调节机构实现行走泵13正向排量大小的调节。同理给定电比例减压阀9一定大小的控制电流,可以实现行走泵13反向排量的调节,即通过控制电比例减压阀8和9输入电流的大小,即可控制行走泵13的正、反向排量大小调节,排量调节范围0.1%。
电比例换向阀21和变量调节缸20组成行走马达19的排量调节机构,通过调节电比例换向阀21输入电流控制变量调节缸20位移,从而实现马达排量的调节。排量调节为线性必例调节,调节范围30.1%。冲洗阀18和节流阀19用于将泵吸油侧一定流量的热油导流到马达壳体,通过壳体回油冷却和补油泵补油保证主油路工作温度符合要求。溢流阀16为1个回油背压阀。
行走泵和行走马达(排量为线性比例调节)均为变量元件,在其组成的容积调速回路中,可实现恒转矩调节和恒功率调节,以此适应各种工况下的转速调节,从而实现推土机的无级调速功能。同时通过控制行走泵和马达的排量,可使左、右行走系统产生速度差,实现推土机的左、右转向。当其中一侧行走系统静止、另一侧运动时,即可实现推土机原地转向。
左、右行走系统的泵和马达均为电比例控制,控制方式分为数字量控制和模拟量控制,数字量控制采用脉宽调制信号PWM形式,矩形波占空比在范围内可调。模拟量控制采用直流电叠加或不叠加颤振信号形式,很好地与电气控制系统相结合。在推土机主机驾驶室和遥控室中分别设置电控手柄,可分别实现传统驾驶室操作模式与遥控模式。
辅助系统
辅助系统分为供油系统、制动系统和回油冷却系统3部分组成,在供油系统中,辅助泵2经粗滤1从液压油箱40中吸油,再经过滤器I过滤后,分别为主油路补油、控制阀组控制、行走马达控制和制动器控制提供压力油,定差溢流阀4可在精滤3堵塞达到压差设定值后,使油液直接进入系统;在制动系统中,通过控制电磁换向阀22的通断控制制动器23和24,在推土机需要制动时,控制行走泵的电比例减压阀全部失电,使行走泵排量降为零,切断了行走主油路的压力油。同时电磁换向阀22失电切断制动器压力油,制动器中油液回油箱,依靠弹簧复位后的压紧力实现制动。在回油冷却系统中,行走泵、控制阀组和行走马达的壳体中的油经冷却器14流回油箱,单向阀15可在冷却器堵塞或回油量过大时,使油液直接流回液压油箱,保护过滤器。
工作装置液压系统
工作装置液压系统由工作系统和控制系统2部分组成,控制系统采用电控和液控并存的结构形式,可实现远程遥控操作和驾驶室直接操作双模式并存。电控结构可与电气控制系统良好结合,从而实现无线遥控功能。液控结构采用液压先导控制,具有良好的可靠性,在遥控系统出现故障时,依然可以在驾驶室中正常操作推土机工作,工作装置液压系统原理如图2所示。
工作系统
双联泵19大泵经粗滤器吸油向工作系统供油,溢流阀18限定工作油路最高压力和起安全保护的作用。三位换向阀15通过切换倾斜缸进回油方向,实现铲刀左倾、右倾调整动作。同理四位换向阀14用于实现铲刀提升、下降动作,当四位换向阀14在最右端阀位工作时,2个铲刀升降缸进、回油路相通,升降缸2腔同时进入失压状态,实现铲刀浮动动作。两换向阀采用串并联结构,同一时间只能允许铲刀实现单一调整动作,铲刀动作所需供油量充分,铲刀动作调整响应迅速。
倾斜缸动作所需流量小于升降缸流量,在设计倾斜管路时,可让倾斜管路直径小于升降管路直径,即通过管路节流来使铲刀倾斜缸获得所需的流量。铲刀升降油路和倾斜油路共接有4个过载补油阀,在推土铲受到冲击时,液压缸压力油腔通过过载补油阀中的溢流阀对系统进行保护,同时液压缸无压腔通过过载补油阀单向阀进行补油,避免液压缸无压腔吸空。
控制系统
控制系统分为供油系统、液控系统和电控系统共3部分。双联小泵吸油后经精滤器过滤后分别向液控系统、电控系统和蓄能器供油。溢流阀4作为调压阀用于限定控制系统压力,单向阀4用于因发动机熄火造成泵停止运行后保持蓄能器压力,蓄能器6用于在发动机熄火后继续为控制系统提供压力油,从而可以控制铲刀自由降落至地面。在先导阀组和电控阀组出现故障时,将截止阀7关闭,使蓄能器中的压力油锁住,可避免拆卸管路时油液喷出,方便对控制阀组进行检修。
液控系统由先导阀组、阀组进回油管路和控制管路组成。供油系统向先导阀组9提供一定压力油液,压力油通过阀组减压后经电控阀组梭阀对换向阀进行位移控制,同时换向阀芯回油经过梭阀流回油箱。该阀组为线性比例阀,可以根据阀组控制手柄位移大小输出不同压力的控制油。线性比例控制换向阀阀芯位移,实现不同流量的输出,便可满足驾驶员对铲刀调整动作不同速度的需求。
电控系统由电控阀组、阀组进回油管路和控制管路组成,电控阀组8由4个电比例压阀和4个梭阀组成。电比例减压阀为线性比例控制,可以根据输入控制电流的大小,将供油系统提供的压力油调节到所需压力,经梭阀对换向阀阀芯进行位移控制,从而实现驾驶员对所需的油缸动作和不同的动作速度。换向阀芯回油也经过梭阀流回油箱。
4个梭阀在系统中起到2个作用:一是实现电控系统和液控系统并存的结构形式;二是在电控或液控某一系统执行控制动作时,对另一系统进行冲击保护。4个电比例减压阀为电信号控制,是实现工作装置无线遥控动作的关键部分。
二、实际应用结果
本系统已成功应用于某型遥控推土机中,通过与电气控制系统的良好结合性,实现了推土机的遥控功能,可使驾驶员在遥控室中快速准确地控制堆土机行走动作和工作装置动作。在实际应用过程中,液压系统元件压力、流量等参数需根据不同功率大小的推土机具体要求进行计算。本系统在创新的同时兼顾传统,实现了推土机无线遥控驾驶模式和传统驾驶模式并存的结构形式,提高了推土机应对各种工况的适应性。
本系统在工作装置动作控制过程中,传统液控模式采用先导阀控制作业,无线遥控模式采用电信号控制遥控阀组来控制作业,2种模式都减小了驾驶员的劳动强度,且两者都与蓄能器相结合,保证在发动机熄火后操作先导阀或者遥控阀组可以使铲刀正常降落到地面。在进行其中任何一种模式操作时,另一种模式液压系统通过遥控阀组中的梭阀得到很好的冲击保护,保证了系统的正常运行和使用寿命。本系统充分发挥了推土机应对各种特殊、复杂工况的作业优势,尤其在作业环境恶劣的工况中,有效保证了作业人员的健康和安全。
敬请关注 《工程机械与维修》&《今日工程机械》 官方微信
更多精彩内容,请关注《工程机械与维修》与《今日工程机械》官方微信